


Data Buoy Types

 Whether they are drifting or moored, data buoys measure and transmit automatically, in a predictable and controlled way, communicating in real time via satellite telecommunication systems such as Argos, Orbcomm and Iridium.
Whether they are drifting or moored, data buoys measure and transmit automatically, in a predictable and controlled way, communicating in real time via satellite telecommunication systems such as Argos, Orbcomm and Iridium.
Data buoy observations make significant contributions to our ability to model, understand and describe global weather and climate on all time and space scales. The data collected complements or validates data from other platforms, such as from Voluntary Observing Ships or weather satellites.
Drifting and moored data buoys are now generally accepted as a very cost-effective means for obtaining meteorological and oceanographic data from remote ocean areas. There are many different types of drifting buoys and moored buoys used by the DBCP depending on the application and measurements needed in different areas of the ocean.
View different types of data buoys on the DBCP Photos page
Drifting Buoys
 Drifting buoys are generally attached to some form of drogue or sea-anchor, are easy to deploy,are relatively inexpensive to operate and reliably measure the atmosphere and ocean surface conditions, for an average of 18 months.
Drifting buoys are generally attached to some form of drogue or sea-anchor, are easy to deploy,are relatively inexpensive to operate and reliably measure the atmosphere and ocean surface conditions, for an average of 18 months.
Drifting buoys have a long history of use in oceanography, principally for the measurement of currents. There have also been many types of drifting buoys used for meteorological purposes since the First GARP Global Experiment (FGGE) in the 1970s.
The DBCP has been working for decades to design standardised drifting buoys to suit observational requirements for meteorological and oceanographic applications. Buoys that track surface currents in this way are called Lagrangian drifters and track ocean currents at the depth corresponding to the length of their drogue whilst collecting surface and subsurface measurements.
History
 Lagrangian drifters were first designed and deployed in the world oceans in the context of the Surface Velocity Program (SVP) of the World Ocean Circulation Experiment (WOCE) » and the Tropical Ocean and Global Atmosphere Program (TOGA) , which became the Global Drifter Program (GDP).
Lagrangian drifters were first designed and deployed in the world oceans in the context of the Surface Velocity Program (SVP) of the World Ocean Circulation Experiment (WOCE) » and the Tropical Ocean and Global Atmosphere Program (TOGA) , which became the Global Drifter Program (GDP).
These SVP drifters were standardized in 1991, with small spherical hull and floats, and large Holey-Sock drogue centred at 15 meters below the surface. In 1993, drifters with barometer ports, called SVPB drifters were tested in the high seas and proven reliable. The Lagrangian Barometer Drifter, designed by the GDP, is now commercially available at low cost, and meets both oceanographic requirements (research: measurements of sea surface currents and sea temperature) and meteorological requirements (operational: sea surface temperature and air pressure).
The DBCP has now mostly standardised on the use of SVP and SVP buoys, and their variants for the high seas - further information is available here.
Ice Buoys
 Ice buoys have been used extensively in Arctic and Antarctic regions to track ice movement and are available commercially for deployment by ships or aircraft. Such buoys are equipped with low temperature electronics and lithium batteries that can operate at temperatures down to -50°C. In addition to the regularly-computed Argos locations the ice buoys can be equipped with satellite navigation receivers (e.g. GPS) which can compute even more accurate positions.
Ice buoys have been used extensively in Arctic and Antarctic regions to track ice movement and are available commercially for deployment by ships or aircraft. Such buoys are equipped with low temperature electronics and lithium batteries that can operate at temperatures down to -50°C. In addition to the regularly-computed Argos locations the ice buoys can be equipped with satellite navigation receivers (e.g. GPS) which can compute even more accurate positions.
Sub-surface floats
These are autonomous free-drifting platforms gathering data at mid-depth and surfacing from time to time to transmit. These platforms are coordinated under the Argo Program »
Moored Buoys
 Are anchored at fixed locations and regularly collect observations from many different atmospheric and oceanographic sensors. Moored buoys are usually deployed to serve national forecasting needs, maritime safety needs or to observe regional climate patterns.
Are anchored at fixed locations and regularly collect observations from many different atmospheric and oceanographic sensors. Moored buoys are usually deployed to serve national forecasting needs, maritime safety needs or to observe regional climate patterns.
Moored buoys are normally relatively large and expensive platforms. They can vary from a few meters in height and breadth, to over 12 meters. Measurements from the mooring include surface variables (wind, air and sea surface temperature, salinity, air pressure), as well as subsurface temperatures down to a depth of 500 plus meters.
Data are usually collected through one of Argos, Iridium, ORBCOMM, GOES or METEOSAT, transmitted in real-time and shared on the GTS of WMO. They are generally upgraded or serviced yearly. They need to be constructed of very hardy materials to avoid problems in storms or high seas, the tether line which holds the buoy in the desired location needs to be especially strong. The design also needs to counter intentional vandalism or accidental damage. Many different designs exist for moored buoys depending on the ocean area.
") As they are recording so many measurements, the moorings often store more data on-board than they send in real time, so when a moored buoy is recovered, processing and analysis of the data is performed at the buoy owner's data center.
As they are recording so many measurements, the moorings often store more data on-board than they send in real time, so when a moored buoy is recovered, processing and analysis of the data is performed at the buoy owner's data center.
If a moored buoy goes adrift it represents a potential loss of costly equipment and a possible hazard to navigation. For this reason a backup location system is used to ensure that an alert is sent if the buoy leaves a certain area.
Tropical Moored Buoys
A major part of the DBCP's moored buoy network is the Tropical Moored Buoy Implementation Panel array, which has arrays of moorings in each ocean basin and are used to monitor large scale phenomenon such as El Niño and the Southern Oscillation, showing the importance in the annual variability of global climate.
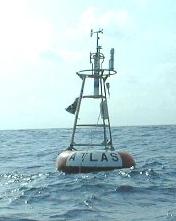 Most of the buoys in these arrays are the ATLAS mooring, developed at NOAA's Pacific Marine Environmental Laboratory (PMEL) Seattle, WA, in the 1980's, is a taut wire surface mooring with a tube-like float. It is deployed in depths of up to 6000 meters. Measurements from the mooring include surface variables, as well as subsurface temperatures down to a depth of 500 meters. This array and its planned expansion is the result of international collaboration between scientists from France, Japan, Korea, Indonesia, Western Africa, India and the USA.
Most of the buoys in these arrays are the ATLAS mooring, developed at NOAA's Pacific Marine Environmental Laboratory (PMEL) Seattle, WA, in the 1980's, is a taut wire surface mooring with a tube-like float. It is deployed in depths of up to 6000 meters. Measurements from the mooring include surface variables, as well as subsurface temperatures down to a depth of 500 meters. This array and its planned expansion is the result of international collaboration between scientists from France, Japan, Korea, Indonesia, Western Africa, India and the USA.
Wave Buoys
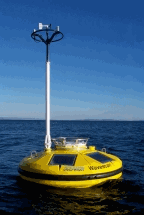 Many different sorts of Wave Buoys exist to capture and model information about ocean dynamics on the surface. These buoys measure the frequency and size of wave energy (known as the spectra) from which significant wave height, dominant wave period, and average wave period are derived. Even the direction of wave propagation is measured on many moored buoys. This information can be used to greatly improve the prediction and warnings for dangerous storms.
Many different sorts of Wave Buoys exist to capture and model information about ocean dynamics on the surface. These buoys measure the frequency and size of wave energy (known as the spectra) from which significant wave height, dominant wave period, and average wave period are derived. Even the direction of wave propagation is measured on many moored buoys. This information can be used to greatly improve the prediction and warnings for dangerous storms.
OceanSITES reference time series stations
 These include multi-disciplinary platforms measuring air-sea interactions, and deep ocean conditions for many variables over an extended time period. These platforms are coordinated globally by the OceanSITES team ».
These include multi-disciplinary platforms measuring air-sea interactions, and deep ocean conditions for many variables over an extended time period. These platforms are coordinated globally by the OceanSITES team ».